全球知名半导体制造商ROHM(总部位于日本京都市)面向随着自动驾驶和高级驾驶辅助系统(ADAS)的发展而需求不断增长的高速车载通信系统,开发出支持CAN FD(CAN with Flexible Data rate)*1总线端口保护的双向TVS(ESD保护)二极管*2“ESDCANxx系列”。CAN FD是车载ECU(电子控制单元)之间实时且安全的数据收发所必需的通信技术。新产品可在不使CAN FD等高速通信中的传输信号劣化的前提下,保护ECU等电子设备免受浪涌和静电放电(ESD)的影响,从而实现高品质的车载通信。
“ESDCANxx系列”有SOT-23(2.9mm×2.4mm)和DFN1010(1.0mm×1.0mm)两种封装,分别支持24V和27V的截止电压(VRWM)。SOT-23封装有支持24V的“ESDCAN24HPY”、“ESDCAN24HXY”和支持27V的“ESDCAN27HPY”、“ESDCAN27HXY”共4款,DFN1010封装有支持24V的“ESDCAN24YPA”、“ESDCAN24YXA”和支持27V的“ESDCAN27YPA”、“ESDCAN27YXA”共4款,两种封装合计8款新产品。
随着自动驾驶技术和ADAS技术的快速发展,对速度更快、可靠性更高的车载通信系统的需求也随之增加。特别是自动驾驶领域,需要快速、准确地处理从摄像头、LiDAR和雷达等的传感器获取的大量信息,因此以往车载通信所用的CAN逐渐被能够更高速、更大容量地传输数据的CAN FD取代。另一方面,要想提高车载通信的速度,就必须实现在严苛环境下的稳定通信,因此对引脚间电容低、抗浪涌和钳位电压等特性优异的保护器件的需求日益高涨。因此,车载通信用TVS二极管市场预计未来将会进一步增长。为了满足这些市场需求,ROHM开发出同时实现了低引脚间电容和出色抗浪涌能力的新产品“ESDCANxx”。
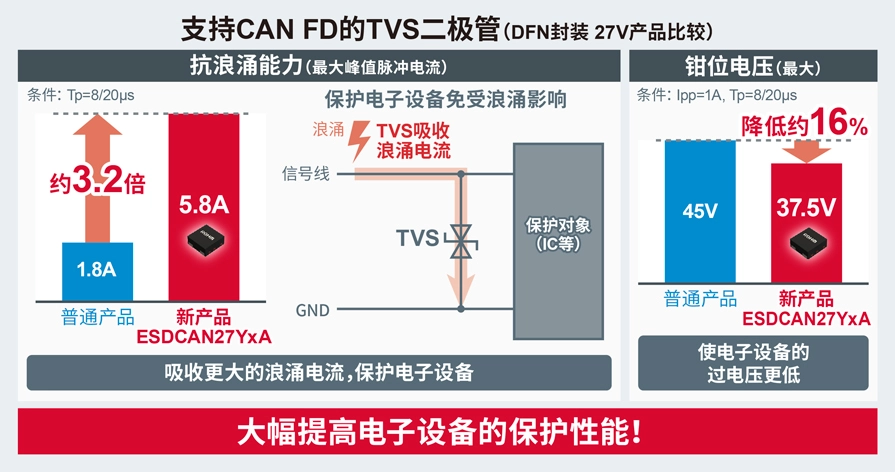
新产品通过优化元件结构,将引脚间电容*3降至最大3.5pF,可防止高速通信时的信号劣化。另外还实现了出色的抗浪涌特性,大大提高了车载环境中电子设备的保护性能。例如,DFN1010封装的支持27V的新产品,与支持CAN FD的同等普通产品相比,抗浪涌能力*4提高了约3.2倍,钳位电压*5也降低了约16%。这可以有效地保护车载ECU等昂贵且对浪涌敏感的电子设备,即使在严苛的车载环境中也能提供高可靠性。
未来,ROHM将继续开发支持车载通信系统高速化的产品,为自动驾驶和车载通信环境的发展、并为实现更安全、更先进的出行社会贡献力量。
<产品阵容>
| 产品型号 | 绝对最大额定值(Ta=25℃) | 特性(Ta=25℃) | 极性 | 符合 车载 标准 AEC- Q101 |
封装 [mm] |
|||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 峰值脉冲 功率 (tp=8/20μs) PPP Max. [W] |
峰值脉冲 电流 [抗浪涌能力] (tp=8/20μs) IPP Max. [A] |
ESD 耐受能力 (C=150pF, R=330Ω) VESD Max. [kV] |
结温 Tj Max. [℃] |
截止 电压 VRWM Max. [V] |
击穿 电压 (IR=1mA) VBR [V] |
钳位 电压 (tp=8/20μs) VCL Max. [V] |
引脚间 电容 (VR=0V) Ct Max. [pF] |
|||||||
| Min. | Max. | IPP=3A | IPP=1A | |||||||||||
| NEW |
购买 数据表 |
180 | 4.3 | 30 | 150 | 24 | 25.5 | 30 | 43.5 | 35.5 | 3.5 | 双向 | ✓ |  SOT-23 (2.9 × 2.4 × 0.95) |
| NEW |
购买 数据表 |
175 | ✓ | |||||||||||
| NEW |
购买 数据表 |
4.0 | 150 | 27 | 28 | 32.5 | 47.5 | 38.5 | ✓ | |||||
| NEW |
购买 数据表 |
175 | ✓ | |||||||||||
| NEW |
购买 数据表 |
220 | 6.0 | 15 | 150 | 24 | 25.5 | 30 | 38.5 | 35 | 3.5 | 双向 | ✓ |  DFN1010 (1.0 × 1.0 × 0.4) |
| NEW |
购买 数据表 |
175 | ✓ | |||||||||||
| NEW |
购买 数据表 |
230 | 5.8 | 150 | 27 | 28 | 32.5 | 41.5 | 37.5 | ✓ | ||||
| NEW |
购买 数据表 |
175 | ✓ | |||||||||||
<应用示例>
- 自动驾驶和高级驾驶辅助系统(ADAS)
- 汽车电动动力总成系统
- 车载信息娱乐系统等
<术语解说>
- *1)CAN FD(CAN with Flexible Data rate)
- CAN(Controller Area Network)协议的升级版,与传统的CAN相比,数据传输速度更快,数据容量更大。在自动驾驶和ADAS等系统中,多个车载电子控制单元(ECU) 之间的实时通信需要CAN FD协议。
- *2)TVS二极管(Transient Voltage Suppressor Diode)
- 一种可保护电路免受过电压、浪涌和静电放电 (ESD:Electrostatic Discharge)影响的半导体器件。TVS二极管通过吸收突发的电压和电流尖峰(浪涌),来防止电路损坏和误动作。在车载环境中,防止异常的电气波动非常重要。
- *3) 引脚间电容(Capacitance Between Terminals)
- 电子元器件中产生的不必要的电容分量。如果引脚间电容较大,高速通信时信号就会劣化,因此在车载通信应用中降低引脚间电容非常重要。
- *4) 抗浪涌能力(Surge Current Rating)
- TVS二极管能够承受的最大浪涌电流值。抗浪涌能力越高,对车载环境中异常电气波动的防护能力就越强。
- *5) 钳位电压(Clamping Voltage)
- TVS二极管抑制浪涌等引起的过电压时电路内维持的电压。该电压越低,越可以有效地保护电路和设备,从而提高车载设备的可靠性。